Learning how to create observables
For now this is just here to give us a place to play around with and demonstrate different observables. Eventually we can flesh it out into a full-blown observables tutorial.
We start from a simple toy data form a 2D nonlinear system. Then we build observables from identity, polynomial, time delays,random fourier features (isotropic gaussian kernel) with and without states included, and customized observables by manually defining lambda functions. Finally, we can even arbitrary concate those observables.
[1]:
import sys
sys.path.append('../src')
[2]:
import matplotlib.pyplot as plt
import numpy as np
from scipy.integrate import odeint
import pykoopman as pk
D:\pykoopman\src\pykoopman\__init__.py:3: UserWarning: pkg_resources is deprecated as an API. See https://setuptools.pypa.io/en/latest/pkg_resources.html. The pkg_resources package is slated for removal as early as 2025-11-30. Refrain from using this package or pin to Setuptools<81.
from pkg_resources import DistributionNotFound
[3]:
def data_2D_superposition():
t = np.linspace(0, 2 * np.pi, 200)
x = np.linspace(-5, 5, 100)
[x_grid, t_grid] = np.meshgrid(x, t)
def sech(x):
return 1 / np.cosh(x)
f1 = sech(x_grid + 3) * np.exp(1j * 2.3 * t_grid)
f2 = 2 * (sech(x_grid) * np.tanh(x_grid)) * np.exp(1j * 2.8 * t_grid)
return f1 + f2
x = data_2D_superposition()
[4]:
def plot_observables(observables, x, t, input_features=None, t_delay=None):
'''Generate plots of state variables before and after being transformed into new observables.'''
n_features = x.shape[1]
if input_features is None:
input_features = [f'x{i}' for i in range(n_features)]
if t_delay is None:
t_delay = t
# Plot input features (state variables)
fig, axs = plt.subplots(1, n_features, figsize=(n_features * 5, 3))
for ax, k, feat_name in zip(axs, range(n_features), input_features):
ax.plot(t, x[:, k])
ax.set(xlabel='t', title=feat_name)
fig.suptitle('Original state variables')
fig.tight_layout()
# fig.show()
# Plot output features
y = observables.fit_transform(x)
n_output_features = observables.n_output_features_
feature_names = observables.get_feature_names(input_features)
n_rows = (n_output_features // 3) + (n_output_features % 3 > 0)
fig, axs = plt.subplots(n_rows, 3, figsize=(15, 3 * n_rows), sharex=True)
for ax, k, feat_name in zip(axs.flatten(), range(n_output_features), feature_names):
ax.plot(t_delay, y[:, k])
ax.set(xlabel='t', title=feat_name)
fig.suptitle('Observables')
fig.tight_layout()
# fig.show()
return
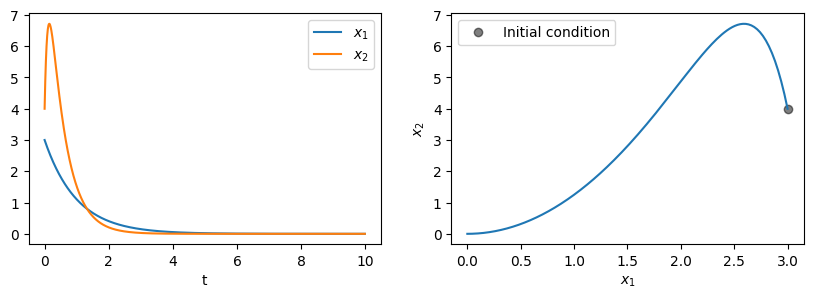
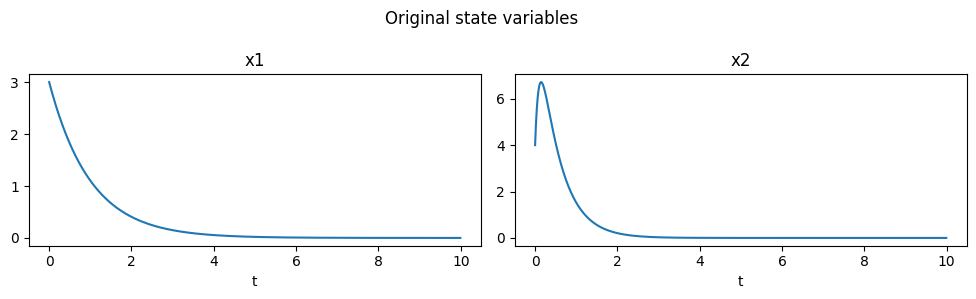
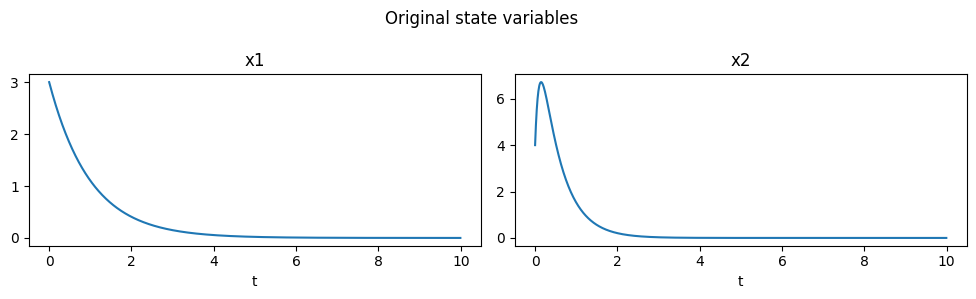
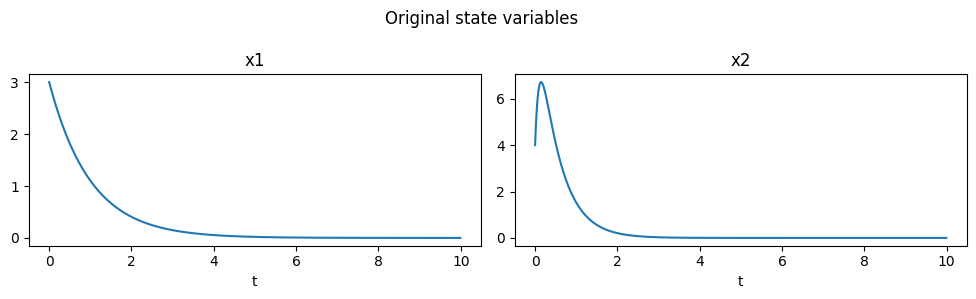
For our data we’ll consider the simple nonlinear system with a single fixed point and a slow manifold:
For \(\lambda < \mu < 0\), the system has a slow attracting manifold along \(x_2=x_1^2\) and a fixed point at \((0, 0)\).
[5]:
mu = -1
lam = -10
def ode(z, t):
return [
mu * z[0],
lam * (z[1] - z[0] ** 2)
]
dt = 0.01
t_train = np.arange(0, 10, dt)
x0_train = [3, 4]
x_train = odeint(ode, x0_train, t_train)
input_features = ["x1", "x2"]
[6]:
fig, axs = plt.subplots(1, 2, figsize=(10, 3))
axs[0].plot(t_train, x_train[:, 0], label='$x_1$')
axs[0].plot(t_train, x_train[:, 1], label='$x_2$')
axs[0].set(xlabel='t')
axs[0].legend()
axs[1].plot(x_train[0, 0], x_train[0, 1], 'o', color='black', label="Initial condition", alpha=0.5)
axs[1].plot(x_train[:, 0], x_train[:, 1])
axs[1].set(xlabel='$x_1$', ylabel='$x_2$')
axs[1].legend();
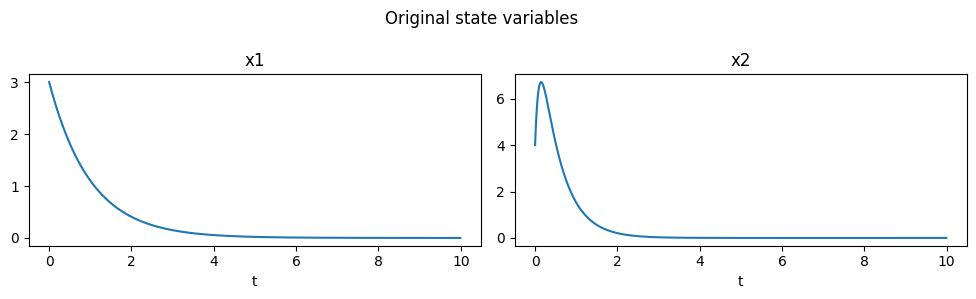
Identity
The Identity observables simply leave the state variables unmodified.
[7]:
obs = pk.observables.Identity()
plot_observables(obs, x_train, t_train, input_features=input_features)


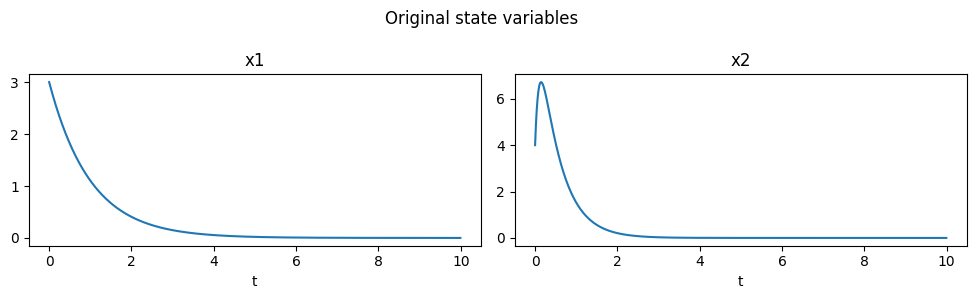
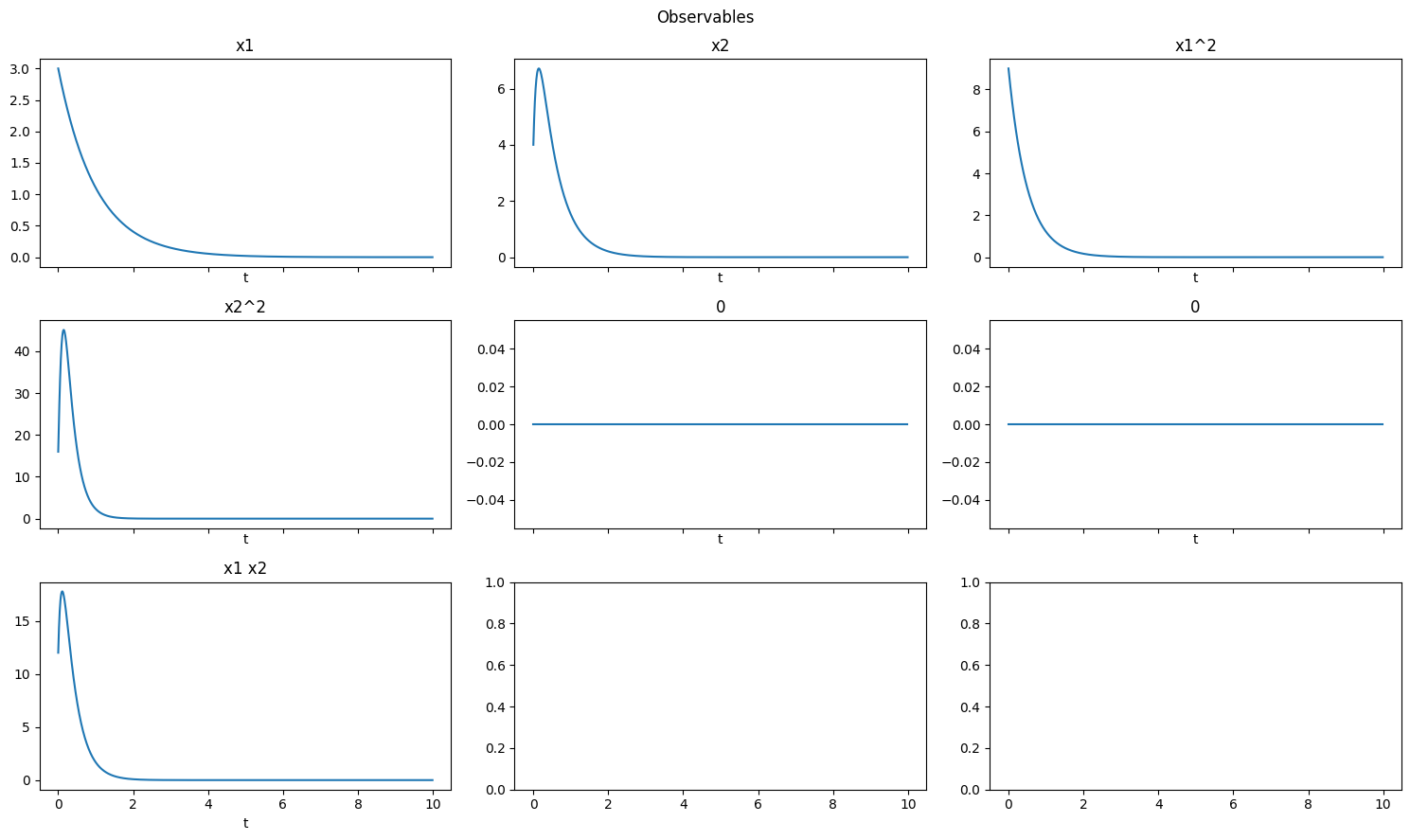
Polynomial
Polynomial observables compute polynomial functions of the state variables.
[8]:
obs = pk.observables.Polynomial(degree=2)
plot_observables(obs, x_train, t_train, input_features=input_features)
d:\pykoopman\.venv\Lib\site-packages\sklearn\utils\deprecation.py:103: FutureWarning: The attribute `n_input_features_` was deprecated in version 1.0 and will be removed in 1.2.
warnings.warn(msg, category=FutureWarning)
d:\pykoopman\.venv\Lib\site-packages\sklearn\utils\deprecation.py:103: FutureWarning: The attribute `n_input_features_` was deprecated in version 1.0 and will be removed in 1.2.
warnings.warn(msg, category=FutureWarning)
d:\pykoopman\.venv\Lib\site-packages\sklearn\utils\deprecation.py:87: FutureWarning: Function get_feature_names is deprecated; get_feature_names is deprecated in 1.0 and will be removed in 1.2. Please use get_feature_names_out instead.
warnings.warn(msg, category=FutureWarning)

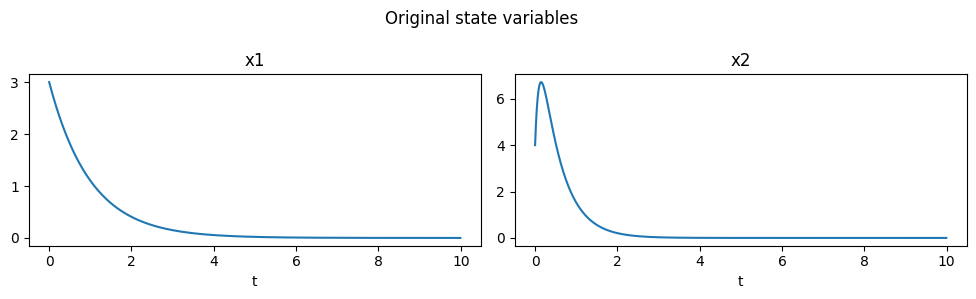
Time-delays
It is often useful to use time-delayed versions of state variables. For example, for a case with delay=1 and n_delays=2, it is the same as replacing \(x(t)\) with \([x(t), x(t-\Delta t), x(t-2\Delta t)]\).
Remark
For vector-valued system state, vectorized time delay is considered, in which the order is given to every state at the latest time stamp, then all the states in previous delayed time stamp, and so on.
The
TimeDelayclass was designed to help construct such observables. Note that it “eats up” the first few state observations (rows ofx_train) because these rows don’t have enough time history to properly form delays. The information is not actually lost as it is used to form a delayed version of its corresponding state variable.
[9]:
delay = 1 # dt
n_delays = 2
obs = pk.observables.TimeDelay(delay=delay, n_delays=n_delays)
t_delay = t_train[delay * n_delays:]
plot_observables(obs, x_train, t_train, input_features=input_features, t_delay=t_delay)

As expected, for such case we have in total 6 output features.
[10]:
obs.n_output_features_
[10]:
6
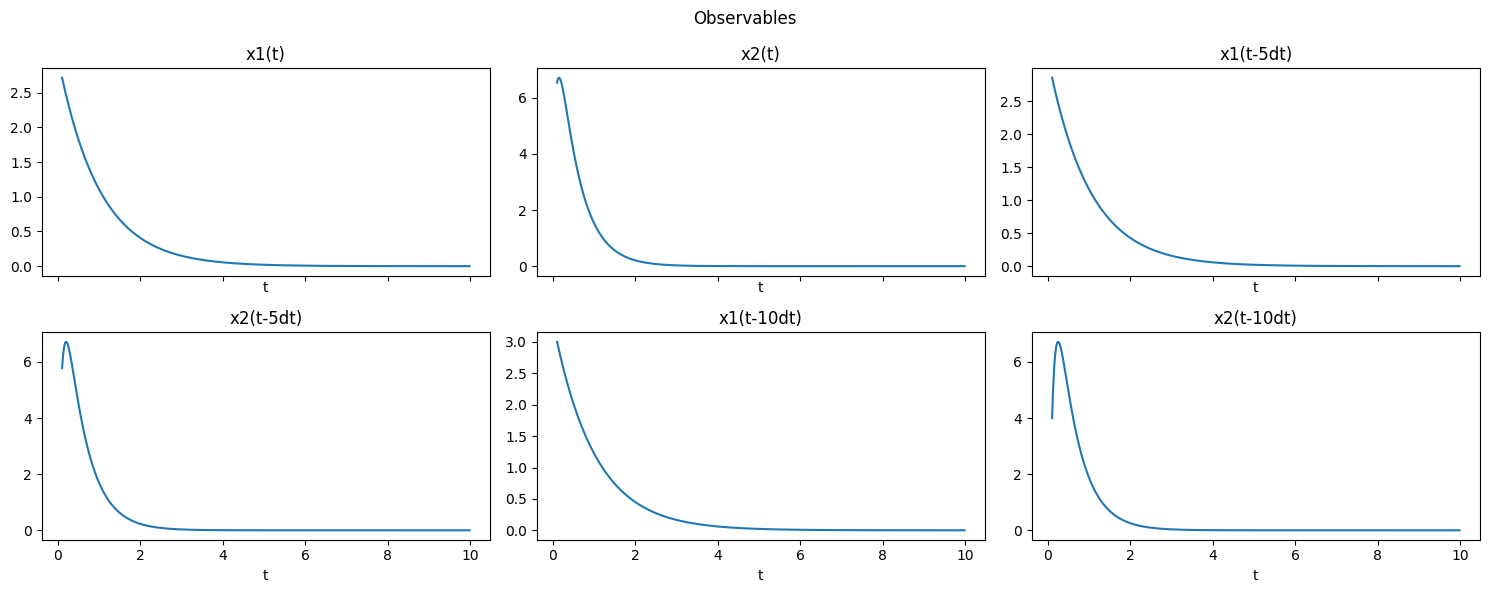
Certainly, one can play with larger stride such as delay=5.
[11]:
delay = 5 # dt
n_delays = 2
obs = pk.observables.TimeDelay(delay=delay, n_delays=n_delays)
t_delay = t_train[delay * n_delays:]
plot_observables(obs, x_train, t_train, input_features=input_features, t_delay=t_delay)
[12]:
obs.fit_transform(x_train).shape
[12]:
(990, 6)
[13]:
obs.get_feature_names()
[13]:
['x0(t)', 'x1(t)', 'x0(t-5dt)', 'x1(t-5dt)', 'x0(t-10dt)', 'x1(t-10dt)']
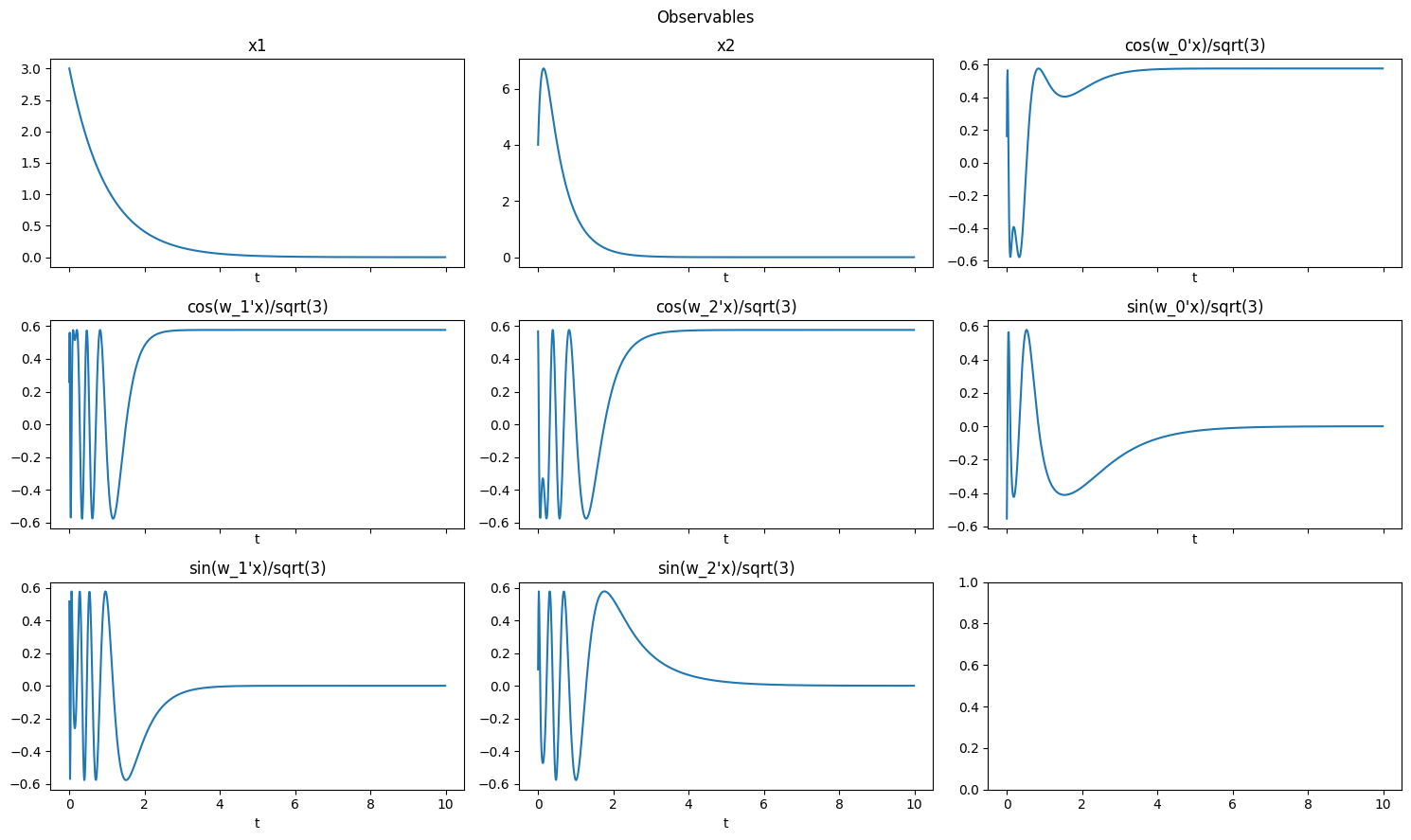
Random Fourier Features
[14]:
# with state
obs = pk.observables.RandomFourierFeatures(include_state=True,gamma=1.0,D=3)
plot_observables(obs, x_train, t_train, input_features=input_features)
[15]:
# without state
obs = pk.observables.RandomFourierFeatures(include_state=False,gamma=0.01,D=5)
plot_observables(obs, x_train, t_train, input_features=input_features)
D:\pykoopman\src\pykoopman\observables\_random_fourier_features.py:105: FutureWarning: `rcond` parameter will change to the default of machine precision times ``max(M, N)`` where M and N are the input matrix dimensions.
To use the future default and silence this warning we advise to pass `rcond=None`, to keep using the old, explicitly pass `rcond=-1`.
self.measurement_matrix_ = np.linalg.lstsq(z, x)[0].T

Custom observables
The CustomObservables class allows one to directly specify functions that should be applied to the state variables. Functions of one variable will be applied to each state variable and multivariable functions will be applied to every valid combination of variables.
Note: the original state variables are automatically included even when one omits the identity function from the set of specified functions.
[16]:
observables = [lambda x: x ** 2, lambda x: 0 * x, lambda x, y: x * y]
observable_names = [
lambda s: f"{s}^2",
lambda s: str(0),
lambda s, t: f"{s} {t}",
]
obs = pk.observables.CustomObservables(observables, observable_names=observable_names)
plot_observables(obs, x_train, t_train, input_features=input_features)
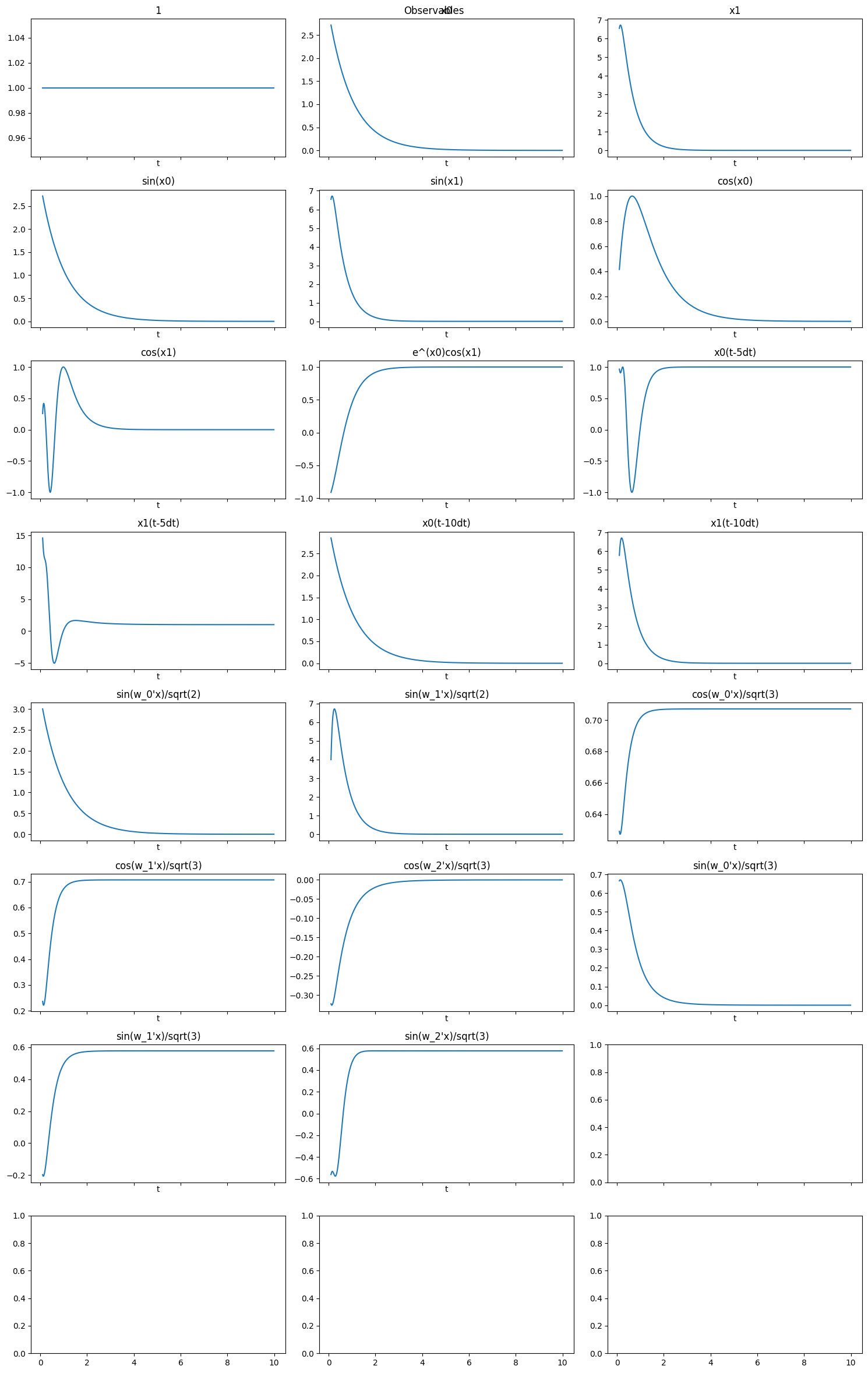
Concate observables
[17]:
# first observable: from Polynomial combinations
ob1 = pk.observables.Polynomial(degree=1)
# second observable: from CustomObservables of univariate functions
observables = [lambda x: np.sin(x), lambda x: np.cos(x), lambda x, y: np.exp(x)*np.cos(y)]
observable_names = [
lambda s: f"sin({s})",
lambda s: f"cos({s})",
lambda s, t: f"e^({s})cos({t})",
]
ob2 = pk.observables.CustomObservables(observables, observable_names=observable_names)
# third observable: a time delay observable
delay = 5 # dt
n_delays = 2
t_delay = t_train[delay * n_delays:]
ob3 = pk.observables.TimeDelay(delay=delay, n_delays=n_delays)
# fourth observable: random fourier feature without state
ob4 = pk.observables.RandomFourierFeatures(include_state=False,gamma=0.01,D=2)
# fifth observable: random fourier feature with state
ob5 = pk.observables.RandomFourierFeatures(include_state=True,gamma=0.1,D=3)
obs = ob1 + ob2 + ob3 + ob4 + ob5
[18]:
plot_observables(obs, x_train, t_train, input_features=input_features, t_delay=t_delay)
D:\pykoopman\src\pykoopman\observables\_random_fourier_features.py:105: FutureWarning: `rcond` parameter will change to the default of machine precision times ``max(M, N)`` where M and N are the input matrix dimensions.
To use the future default and silence this warning we advise to pass `rcond=None`, to keep using the old, explicitly pass `rcond=-1`.
self.measurement_matrix_ = np.linalg.lstsq(z, x)[0].T
d:\pykoopman\.venv\Lib\site-packages\sklearn\utils\deprecation.py:103: FutureWarning: The attribute `n_input_features_` was deprecated in version 1.0 and will be removed in 1.2.
warnings.warn(msg, category=FutureWarning)
d:\pykoopman\.venv\Lib\site-packages\sklearn\utils\deprecation.py:103: FutureWarning: The attribute `n_input_features_` was deprecated in version 1.0 and will be removed in 1.2.
warnings.warn(msg, category=FutureWarning)
d:\pykoopman\.venv\Lib\site-packages\sklearn\utils\deprecation.py:87: FutureWarning: Function get_feature_names is deprecated; get_feature_names is deprecated in 1.0 and will be removed in 1.2. Please use get_feature_names_out instead.
warnings.warn(msg, category=FutureWarning)
d:\pykoopman\.venv\Lib\site-packages\sklearn\utils\deprecation.py:103: FutureWarning: The attribute `n_input_features_` was deprecated in version 1.0 and will be removed in 1.2.
warnings.warn(msg, category=FutureWarning)

[19]:
x_train.shape
[19]:
(1000, 2)
[20]:
obs.fit_transform(x_train).shape
D:\pykoopman\src\pykoopman\observables\_random_fourier_features.py:105: FutureWarning: `rcond` parameter will change to the default of machine precision times ``max(M, N)`` where M and N are the input matrix dimensions.
To use the future default and silence this warning we advise to pass `rcond=None`, to keep using the old, explicitly pass `rcond=-1`.
self.measurement_matrix_ = np.linalg.lstsq(z, x)[0].T
d:\pykoopman\.venv\Lib\site-packages\sklearn\utils\deprecation.py:103: FutureWarning: The attribute `n_input_features_` was deprecated in version 1.0 and will be removed in 1.2.
warnings.warn(msg, category=FutureWarning)
d:\pykoopman\.venv\Lib\site-packages\sklearn\utils\deprecation.py:103: FutureWarning: The attribute `n_input_features_` was deprecated in version 1.0 and will be removed in 1.2.
warnings.warn(msg, category=FutureWarning)
[20]:
(990, 24)