Successful examples of using Dynamic mode decomposition on PDE system
We apply dynamic mode decomposition (DMD) to several PDE systems from J. Nathan Kutz, J. L. Proctor, and S. L. Brunton, “Applied Koopman Theory for Partial Differential Equations and Data-Driven Modeling of Spatio-Temporal Systems,” Complexity, vol. 2018, no. ii, pp. 1–16, 2018.): 1) 1D viscous Burgers equation. 2) 1D nonlinear schrodinger equation
In these two examples, DMD works because the inherent dynamics is both low rank and linear.
We first import the pyKoopman package and other packages for plotting and matrix manipulation.
[1]:
import sys
sys.path.append('../src')
[2]:
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
import warnings
warnings.filterwarnings('ignore')
import matplotlib.cm as cm
from mpl_toolkits.mplot3d import Axes3D
import pykoopman as pk
1. Viscous Burgers equation
where periodic boundary condition is used on \([-15,15]\). Initial condition follows \(u(x,0)=e^{-(x+2)^2}\).
use
vbe.simulateto run simulation in order to get the training datause
vbe.visualize_datato see how data evolves in space and timeuse
vbe.visualize_state_spaceto see the data distribution in the first 3 PCA directions
[3]:
from pykoopman.common import vbe
n = 256
x = np.linspace(-15, 15, n, endpoint=False)
u0 = np.exp(-(x+2)**2)
# u0 = 2.0 / np.cosh(x)
# u0 = u0.reshape(-1,1)
n_int = 3000
n_snapshot = 30
dt = 30. / n_int
n_sample = n_int // n_snapshot
model_vbe = vbe(n, x, dt=dt, L=30)
X, t = model_vbe.simulate(u0, n_int, n_sample)
delta_t = t[1]-t[0]
model_vbe.visualize_data(x, t, X)
model_vbe.visualize_state_space(X)
print("data shape = ",X.shape)



data shape = (30, 256)
Run a vanilla DMD with just rank = 5. First, we import DMD regressor, feed it into Koopman. Second, we use model.fit to fit the data
[4]:
from pydmd import DMD
dmd = DMD(svd_rank=5)
model = pk.Koopman(regressor=dmd)
model.fit(X, dt=delta_t)
[4]:
Koopman(observables=Identity(),
regressor=PyDMDRegressor(regressor=<pydmd.dmd.DMD object at 0x000002791E8A3CD0>))In a Jupyter environment, please rerun this cell to show the HTML representation or trust the notebook. On GitHub, the HTML representation is unable to render, please try loading this page with nbviewer.org.
Koopman(observables=Identity(),
regressor=PyDMDRegressor(regressor=<pydmd.dmd.DMD object at 0x000002791E8A3CD0>))Identity()
Identity()
PyDMDRegressor(regressor=<pydmd.dmd.DMD object at 0x000002791E8A3CD0>)
PyDMDRegressor(regressor=<pydmd.dmd.DMD object at 0x000002791E8A3CD0>)
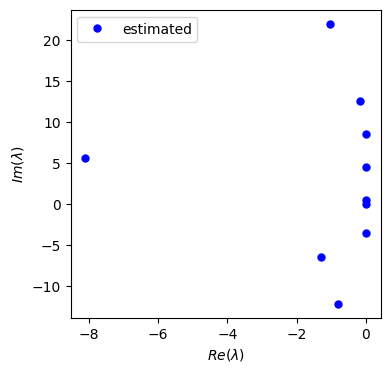
Check spectrum
Just use model.koopman_matrix to get the Koopman matrix
[5]:
K = model.A
# Let's have a look at the eigenvalues of the Koopman matrix
evals, evecs = np.linalg.eig(K)
evals_cont = np.log(evals)/delta_t
fig = plt.figure(figsize=(4,4))
ax = fig.add_subplot(111)
ax.plot(evals_cont.real, evals_cont.imag, 'bo', label='estimated',markersize=5)
# ax.set_xlim([-0.1,1])
# ax.set_ylim([2,3])
plt.legend()
plt.xlabel(r'$Re(\lambda)$')
plt.ylabel(r'$Im(\lambda)$')
# print(omega1,omega2)
[5]:
Text(0, 0.5, '$Im(\\lambda)$')

Define plotting function
[6]:
def plot_pde_dynamics(x, t, X, X_pred, title_list, ymin=0, ymax=1):
fig = plt.figure(figsize=(12, 8))
ax = fig.add_subplot(131, projection='3d')
for i in range(X.shape[0]):
if X.dtype != 'complex':
ax.plot(x, X[i], zs=t[i], zdir='t')
else:
ax.plot(x, abs(X[i]), zs=t[i], zdir='t')
ax.set_ylim([ymin, ymax])
ax.view_init(elev=35., azim=-65, vertical_axis='y')
if X.dtype != 'complex':
ax.set(ylabel=r'$u(x,t)$', xlabel=r'$x$', zlabel=r'time $t$')
else:
ax.set(ylabel=r'mag. of $u(x,t)$', xlabel=r'$x$', zlabel=r'time $t$')
plt.title(title_list[0])
ax = fig.add_subplot(132, projection='3d')
for i in range(X.shape[0]):
if X.dtype != 'complex':
ax.plot(x, X_pred[i], zs=t[i], zdir='t')
else:
ax.plot(x, abs(X_pred[i]), zs=t[i], zdir='t')
ax.set_ylim([ymin, ymax])
ax.view_init(elev=35., azim=-65, vertical_axis='y')
if X.dtype != 'complex':
ax.set(ylabel=r'$u(x,t)$', xlabel=r'$x$', zlabel=r'time $t$')
else:
ax.set(ylabel=r'mag. of $u(x,t)$', xlabel=r'$x$', zlabel=r'time $t$')
plt.title(title_list[1])
ax = fig.add_subplot(133, projection='3d')
for i in range(X.shape[0]):
if X.dtype != 'complex':
ax.plot(x, X_pred[i]-X[i], zs=t[i], zdir='t')
else:
ax.plot(x, abs(X_pred[i]-X[i]), zs=t[i], zdir='t')
ax.set_ylim([ymin, ymax])
ax.view_init(elev=35., azim=-65, vertical_axis='y')
if X.dtype != 'complex':
ax.set(ylabel=r'$u(x,t)$', xlabel=r'$x$', zlabel=r'time $t$')
else:
ax.set(ylabel=r'mag. of $u(x,t)$', xlabel=r'$x$', zlabel=r'time $t$')
plt.title(title_list[2])
run inference using model.simulate
[7]:
X_predicted = np.vstack((X[0], model.simulate(X[0], n_steps=X.shape[0] - 1)))
plot_pde_dynamics(x,t,X, X_predicted, ['Truth','DMD-rank:'+str(model.A.shape[0]),'Residual'])

2. nonlinear schrodinger equation
periodic boundary condition in \([-15,15]\) with initial condition as \(2.0 / \cosh(x)\)
[8]:
from pykoopman.common import nlse
n = 512
x = np.linspace(-15, 15, n, endpoint=False)
u0 = 2.0 / np.cosh(x)
# u0 = u0.reshape(-1,1)
n_int = 10000
n_snapshot = 80 # in the original paper, it is 20, but I think too small
dt = np.pi / n_int
n_sample = n_int // n_snapshot
model_nlse = nlse(n, dt=dt, L=30)
X, t = model_nlse.simulate(u0, n_int, n_sample)
delta_t = t[1] - t[0]
model_nlse.visualize_data(x,t,X)
model_nlse.visualize_state_space(X)




Run a vanilla DMD with rank = 10
[9]:
from pydmd import DMD
dmd = DMD(svd_rank=10)
model = pk.Koopman(regressor=dmd)
model.fit(X, dt=delta_t)
[9]:
Koopman(observables=Identity(),
regressor=PyDMDRegressor(regressor=<pydmd.dmd.DMD object at 0x0000027920F3C350>))In a Jupyter environment, please rerun this cell to show the HTML representation or trust the notebook. On GitHub, the HTML representation is unable to render, please try loading this page with nbviewer.org.
Koopman(observables=Identity(),
regressor=PyDMDRegressor(regressor=<pydmd.dmd.DMD object at 0x0000027920F3C350>))Identity()
Identity()
PyDMDRegressor(regressor=<pydmd.dmd.DMD object at 0x0000027920F3C350>)
PyDMDRegressor(regressor=<pydmd.dmd.DMD object at 0x0000027920F3C350>)
[10]:
K = model.A
# Let's have a look at the eigenvalues of the Koopman matrix
evals, evecs = np.linalg.eig(K)
evals_cont = np.log(evals)/delta_t
fig = plt.figure(figsize=(4,4))
ax = fig.add_subplot(111)
ax.plot(evals_cont.real, evals_cont.imag, 'bo', label='estimated',markersize=5)
# ax.set_xlim([-0.1,1])
# ax.set_ylim([2,3])
plt.legend()
plt.xlabel(r'$Re(\lambda)$')
plt.ylabel(r'$Im(\lambda)$')
# print(omega1,omega2)
[10]:
Text(0, 0.5, '$Im(\\lambda)$')
[11]:
X_predicted = np.vstack((X[0], model.simulate(X[0], n_steps=X.shape[0] - 1)))
plot_pde_dynamics(x,t,X, X_predicted,
['Truth','DMD-rank:'+str(model.A.shape[0]),'Residual'],
0,4)

Conclusion:
DMD works very well for both systems - a simple linear fit can leads to visually very good reconstruction performance for nonlinear system
[ ]:
3. Revisiting cubic-quintic Ginzburg-Landau equation
Previously, we talked about a “Unsuccessful examples of using Dynamic mode decomposition on PDE system” and used an example of Ginzburg-Landau equation. In fact, we can make DMD work by simply truncating the initial transient phase.
[12]:
from pykoopman.common import cqgle
n = 512
x = np.linspace(-10, 10, n, endpoint=False)
u0 = np.exp(-((x) ** 2))
# u0 = 2.0 / np.cosh(x)
# u0 = u0.reshape(-1,1)
n_int = 9000
n_snapshot = 300
dt = 40.0 / n_int
n_sample = n_int // n_snapshot
model_cqgle = cqgle(n, x, dt, L=20)
X, t = model_cqgle.simulate(u0, n_int, n_sample)
Here we truncate it after 100 time units
[13]:
X = X[100:]
[14]:
delta_t = t[1] - t[0]
# usage: visualize the data in physical space
model_cqgle.visualize_data(x, t, X)
model_cqgle.visualize_state_space(X)




In fact, there isn’t any change to the singular spectrum. But now you will see DMD will work amazingly on this problem
[15]:
from pydmd import DMD
dmd = DMD(svd_rank=50)
model = pk.Koopman(regressor=dmd)
model.fit(X, dt=delta_t)
K = model.A
# Let's have a look at the eigenvalues of the Koopman matrix
evals, evecs = np.linalg.eig(K)
evals_cont = np.log(evals)/delta_t
fig = plt.figure(figsize=(4,4))
ax = fig.add_subplot(111)
# ax.plot(evals.real, evals.imag, 'bo', label='estimated', markersize=5)
ax.plot(evals_cont.real, evals_cont.imag, 'bo', label='estimated', markersize=5)
plt.legend()
plt.grid('on')
plt.xlabel(r'$Re(\lambda)$')
plt.ylabel(r'$Im(\lambda)$')
X_predicted = np.vstack((X[0], model.simulate(X[0], n_steps=X.shape[0]-1)))
plot_pde_dynamics(x, t, X, X_predicted,
['Truth','DMD-rank:'+str(model.A.shape[0]),'Residual'], 0, 4)


Conclusion:
by removing some initial phase, we find vanilla DMD algorithm improves significantly. However, this means if one can stabilize DMD for general case, the algorith of Koopman can be much more powerful. This is the motivation for one of the authors to pursue learning stabilized Koopman opeartor.