Hankel Alternative View of Koopman Operator for Lorenz System
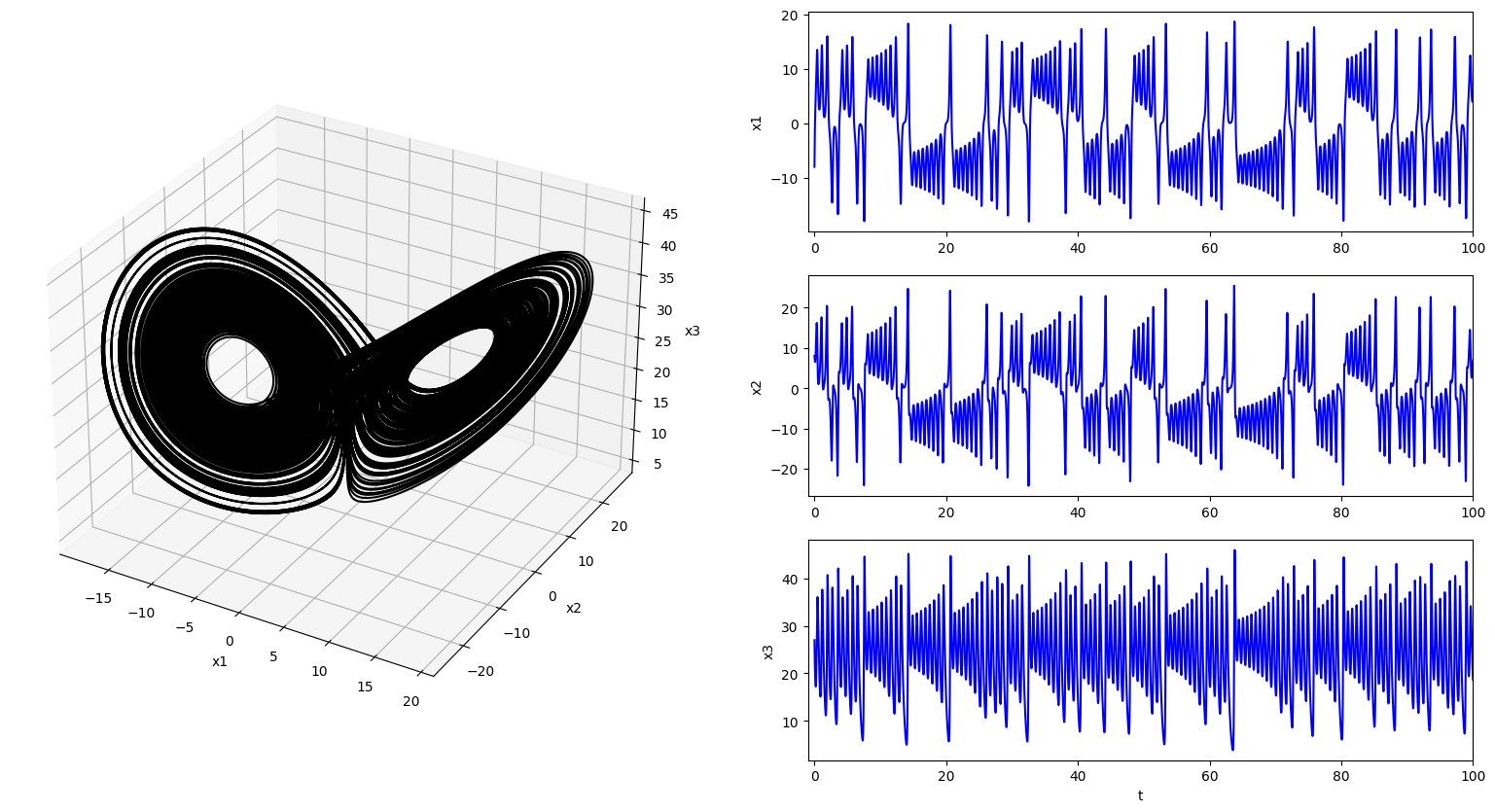
HAVOK combines delay embedding and Koopman theory to decompose chaotic dynamics into a linear model in the leading delay coordinates with forcing by low-energy delay coordinates; this is called the Hankel alternative view of Koopman (HAVOK) analysis. The method is illustrated on the chaotic Lorenz system (see Brunton, Brunton, Proctor, Kaiser & Kutz, “Chaos as an intermittently forced linear system”, Nature Communications 8(19), 2017):
with parameters \(\sigma=10\), \(\rho=28\), and \(\beta=8/3\).
[1]:
import sys
sys.path.append('../src')
[2]:
import numpy as np
from scipy import integrate
import matplotlib.pyplot as plt
from matplotlib.gridspec import GridSpec
import pykoopman as pk
from pykoopman.common import lorenz
D:\pykoopman\src\pykoopman\__init__.py:3: UserWarning: pkg_resources is deprecated as an API. See https://setuptools.pypa.io/en/latest/pkg_resources.html. The pkg_resources package is slated for removal as early as 2025-11-30. Refrain from using this package or pin to Setuptools<81.
from pkg_resources import DistributionNotFound
Collect training data:
[3]:
n_states = 3
x0 = [-8, 8, 27] # initial condition
dt = 0.001 # timestep
t = np.linspace(dt, 200, 200000) # time vector
x = integrate.odeint(lorenz, x0, t, atol=1e-12, rtol=1e-12) # integrate ode
fig = plt.figure(figsize=(30,10))
gs = GridSpec(3, 3, figure=fig)
ax1 = fig.add_subplot(gs[:, 0], projection='3d')
ax1.plot3D(x[:, 0], x[:, 1], x[:, 2], '-k')
ax1.set_xlabel('x1')
ax1.set_ylabel('x2')
ax1.set_zlabel('x3')
ax1.grid()
ax2a = fig.add_subplot(gs[0, 1])
ax2a.plot(t, x[:, 0], '-b', label='x')
ax2a.set_ylabel('x1')
ax2a.set_xlim([-1, 100])
ax2b = fig.add_subplot(gs[1, 1])
ax2b.plot(t, x[:, 1], '-b', label='y')
ax2b.set_ylabel('x2')
ax2b.set_xlim([-1, 100])
ax2c = fig.add_subplot(gs[2, 1])
ax2c.plot(t, x[:, 2], '-b', label='z')
ax2c.set_ylabel('x3')
ax2c.set_xlabel('t')
ax2c.set_xlim([-1, 100])
[3]:
(-1.0, 100.0)
HAVOK regression
The chaotic system is now modeled as a linear model in the leading delay coordinates, \({\bf v}:=[v_1, v_2, \ldots, v_{r-1}]^T\), with forcing by the low-energy, \(r\)th delay coordinate:
.
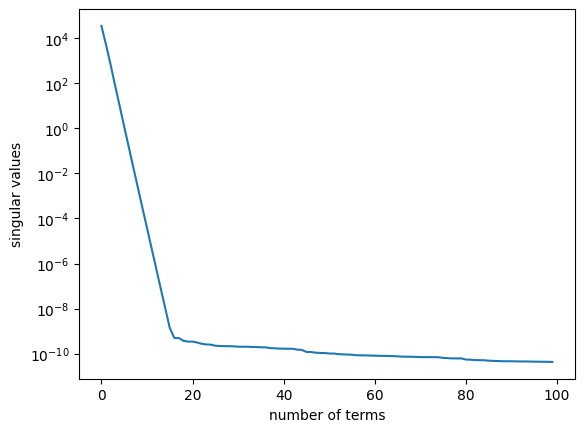
The observables chosen for the HAVOK model are time-delay coordinates of the first state coordinate \(x(t)\). The resulting data matrix is referred to as Hankel matrix. The number of delays is chosen to be \(100\). The HAVOK model computes a SVD of the Hankel matrix:
In order to regress on the V’s delay coordinates, the corresponding time derivative (i.e. \(\dot{\bf v}\)) must be first estimated, e.g. using the 4th order central difference scheme. pyKoopman integrates the package derivative for differentiation, which provides a large suite of differentiation options for both clean and noisy data.
[4]:
n_delays = 100-1
# # time delay on first and second component
# INDEX = [0,1]
# SVD_RANK = 15
# time delay only on first component
INDEX = [0]
SVD_RANK = 15
# # time delay only on second component
# INDEX = [1]
# SVD_RANK = 15
# # time delay on the third component
# INDEX = [2]
# SVD_RANK = 15
[5]:
TDC = pk.observables.TimeDelay(delay=1, n_delays=n_delays)
HAVOK = pk.regression.HAVOK(svd_rank=SVD_RANK, plot_sv=True)
Diff = pk.differentiation.Derivative(kind='finite_difference', k=2) # 4th order
# central difference
model = pk.KoopmanContinuous(observables=TDC, differentiator=Diff, regressor=HAVOK)
model.fit(x[:, INDEX], dt=dt) # Compute model fit using training data
[5]:
KoopmanContinuous(differentiator=Derivative(k=2, kind='finite_difference'),
observables=TimeDelay(n_delays=99),
regressor=HAVOK(plot_sv=True, svd_rank=15))In a Jupyter environment, please rerun this cell to show the HTML representation or trust the notebook. On GitHub, the HTML representation is unable to render, please try loading this page with nbviewer.org.
KoopmanContinuous(differentiator=Derivative(k=2, kind='finite_difference'),
observables=TimeDelay(n_delays=99),
regressor=HAVOK(plot_sv=True, svd_rank=15))TimeDelay(n_delays=99)
TimeDelay(n_delays=99)
HAVOK(plot_sv=True, svd_rank=15)
HAVOK(plot_sv=True, svd_rank=15)
[6]:
model.B.min()
[6]:
-1.1467136340992274
[7]:
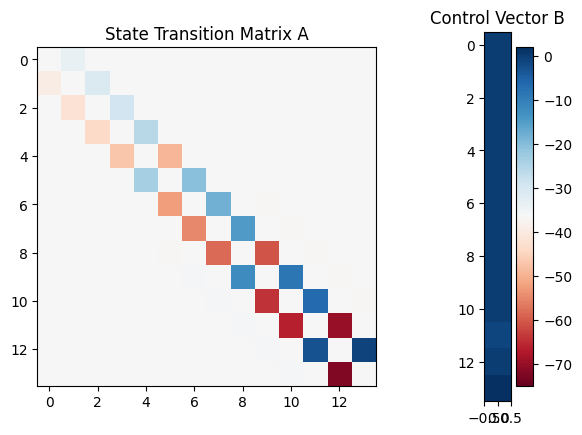
fig = plt.figure()
gs = GridSpec(1, 2, width_ratios=[3, 1])
ax0 = plt.subplot(gs[0])
im = ax0.imshow(model.A, aspect='equal', cmap=plt.get_cmap('RdBu'),vmin=-70, vmax=70)
ax0.set(title='State Transition Matrix A')
ax1 = plt.subplot(gs[1])
im = ax1.imshow(model.B, aspect='equal', cmap=plt.get_cmap('RdBu'), vmin=-75, vmax=2)
ax1.set(title='Control Vector B')
fig.colorbar(im, ax=ax1)
[7]:
<matplotlib.colorbar.Colorbar at 0x260b9b45f90>
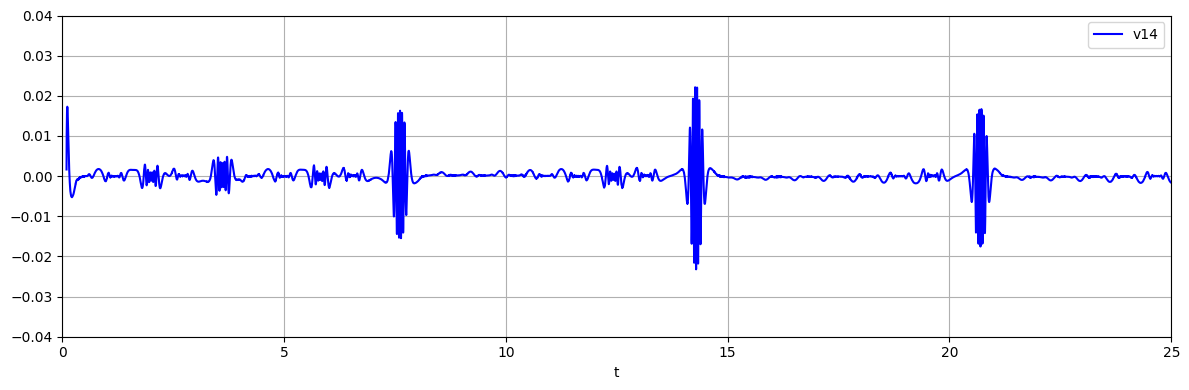
Extract forcing signal
which corresponds to the rth delay vector, here \(v_{14}\). The bursts correspond to lobe switching events of the chaotic Lorenz system.
[8]:
u = model.regressor.forcing_signal
fig, axs = plt.subplots(1, 1, tight_layout=True, figsize=(12, 4))
axs.plot(t[n_delays:], u, '-b', label='v14')
axs.grid()
axs.set_xlabel('t')
axs.legend(loc='best')
plt.xlim([0, 25])
plt.ylim([-.04, .04])
[8]:
(-0.04, 0.04)
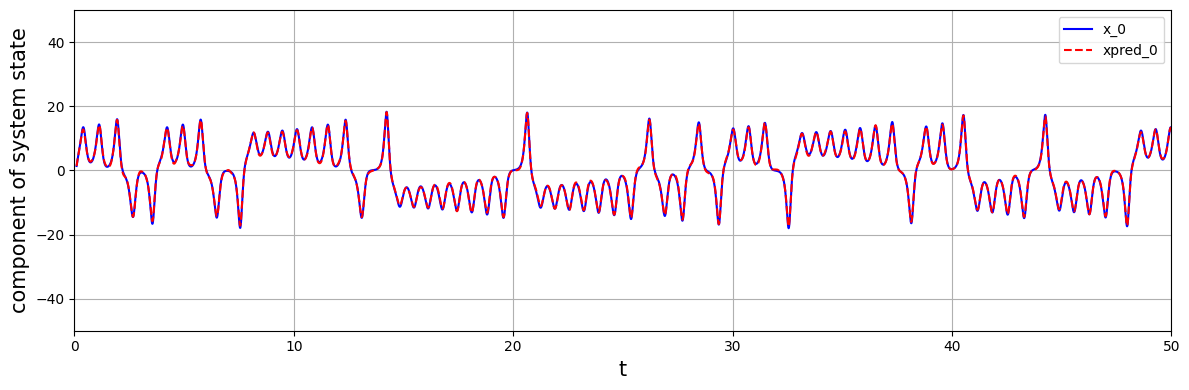
Prediction using the HAVOK model
Using the identified model with the forcing signal \(u=v_{14}\), it is possible to reconstruct the attractor. The figure below shows the reconstructed variable \(x(t)\) based on the model prediction of the dominant delay coordinates. In practice, it is possible to measure \(v_{14}\) from a streaming time series of \(x(t)\) by convolution with the \(u_{14}\) mode (14th column in the matrix U), which can be accessed via model.projection_matrix_.
[9]:
xpred = model.simulate(x[:n_delays+1, INDEX], t[n_delays:]-t[n_delays], u)
[10]:
fig, axs = plt.subplots(len(INDEX), 1, tight_layout=True, figsize=(12, 4*len(INDEX)))
if len(INDEX) > 1:
for i, j in enumerate(INDEX):
axs[i].plot(t[n_delays:], x[n_delays:, j], '-b', label=f'x_{j}')
axs[i].plot(t[n_delays:], xpred[:,j], '--r', label=f'xpred_{j}')
for i in range(2):
axs[i].grid()
axs[i].set_xlabel('t',size=15)
axs[i].set_ylabel('component of system state', size=15)
axs[i].legend(loc='best')
axs[i].set_xlim([0, 50])
axs[i].set_ylim([-50, 50])
else:
axs.plot(t[n_delays:], x[n_delays:, INDEX], '-b', label=f'x_{0}')
axs.plot(t[n_delays:], xpred, '--r', label=f'xpred_{0}')
axs.grid()
axs.set_xlabel('t', size=15)
axs.set_ylabel('component of system state', size=15)
axs.legend(loc='best')
plt.xlim([0, 50])
plt.ylim([-50, 50])
# axs[1].plot(t[n_delays:], x[n_delays:, 2], '--b', label='x_2')
# axs[1].plot(t[n_delays:], xpred[:,1], '--r', label='xpred_2')
[11]:
## Access matrix related to Koopman operator
[12]:
model.A.shape
[12]:
(14, 14)
[13]:
model.C.shape
[13]:
(1, 14)
[14]:
model.W.shape
[14]:
(1, 14)